
一、分类问题
1.定义
分类指的是预测样本所属类别的一类问题。二分类也可以解决任意类别数的多分类问题(one vs rest)。
- 将类型class1看作正样本,其他类型全部看作负样本,然后我们就可以得到样本标记类型为该类型的概率 $p_1$。
- 然后再将另外类型class2看作正样本,其他类型全部看作负样本,同理得到 $p_2$。
- 以此循环,我们可以得到该待预测样本的标记类型分别为类型 class i 时的概率 $p_i$,最后我们取 $p_i$ 中最大的那个概率对应的样本标记类型作为我们的待预测样本类型。
- 总之还是以二分类来依次划分,并求出最大概率结果。
2.应用
在NLP领域,绝大多数任务可以用分类来解决。文本分类天然就是一个分类问题。关键词提取时,对文章中的每个单词判断是否属于关键词,于是转化为二分类问题。在指代消解问题中,对每个代词和每个实体判断是否存在指代关系,又是一个二分类问题。在语言模型中,将词表中每个单词作为一种类别,给定上文预测接下来要出现的单词。
二、线性分类模型
线性模型是传统机器学习方法中最简单最常用的分类模型,用一条线性的直线或高维平面将数据一分为二。
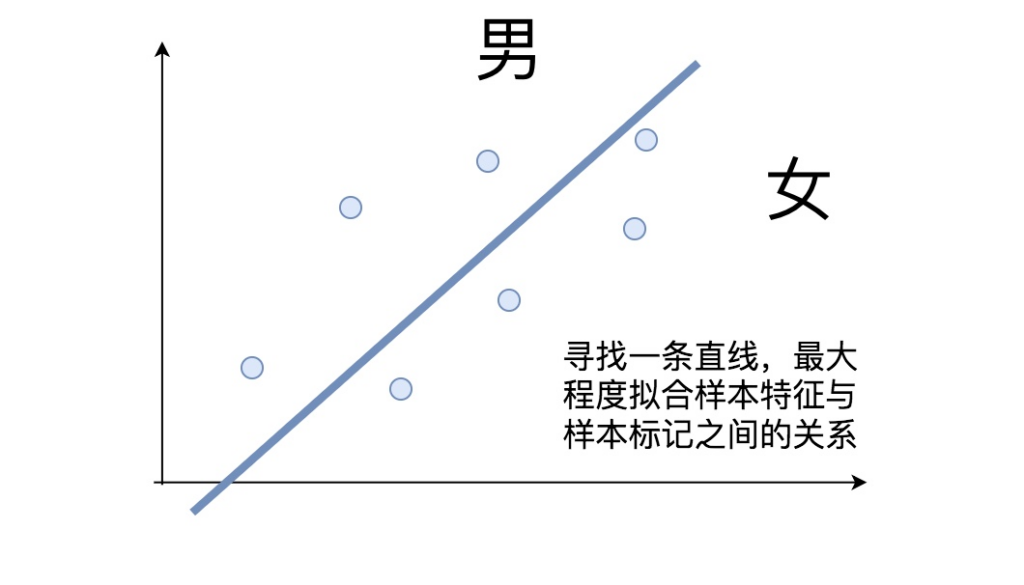
直线将平面分割为两部分,分别对应男女。对于任何姓名,计算它落入哪个区域,就能预测它的性别。这样的区域称为决策区域,它们的边界称为决策边界。二维空间中,如果决策边界是直线,则称为线性分类模型: Y = Wx + b。
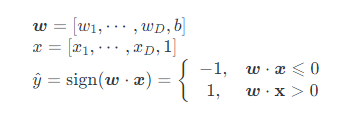
如果是任意维度空间中的线性决策边界统称为分离超平面
推广到 D 维空间,分离超平面的方程为:
$$
\sum_{i=1}^{D} w_{i} x_{i}+b=0
$$
其中,$w$ 是权重,$b$ 偏置(截距),可以写成向量的形式:
三、感知机算法
找出这个分离超平面其实就是感知机算法。感知机算法则是一种迭代式的算法:在训练集上运行多个迭代,每次读入一个样本,执行预测,将预测结果与正确答案进行对比,计算误差,根据误差更新模型参数,再次进行训练,直到误差最小为止。
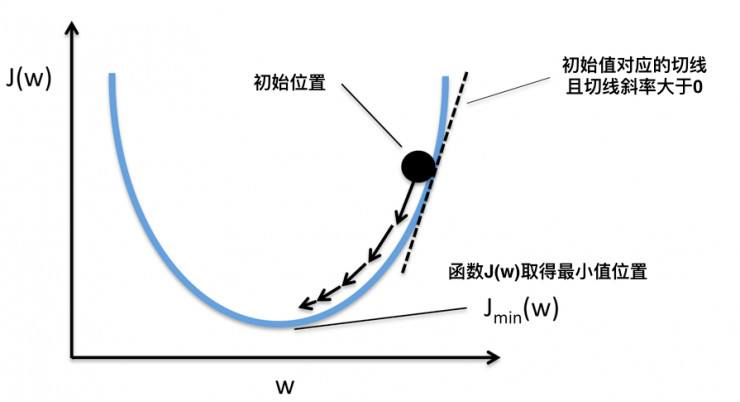
- 损失函数: 从数值优化的角度来讲,迭代式机器学习算法都在优化(减小)一个损失函数( loss function )。损失函数 J(w) 用来衡量模型在训练集上的错误程度,自变量是模型参数 w,因变量是一个标量,表示模型在训练集上的损失的大小。
- 梯度下降: 给定样本,其特征向量 x 只是常数,对 J(w) 求导,得到一个梯度向量 Δw,它的反方向一定是当前位置损失函数减小速度最快的方向。如果参数点 w 反方向移动就会使损失函数减小,叫梯度下降。
- 学习率: 梯度下降的步长叫做学习率。
- 随机梯度下降(SGD): 如果算法每次迭代随机选取部分样本计算损失函数的梯度,则称为随机梯度下降。
这时候问题来了,假如数据本身线性不可分,感知机损失函数不会收敛,每次迭代分离超平面都会剧烈振荡。这时可以对感知机算法打补丁,使用投票感知机或平均感知机。
投票感知机和平均感知机:
投票感知机:每次迭代的模型都保留,准确率也保留,预测时,每个模型都给出自己的结果,乘以它的准确率加权平均值作为最终结果。 投票感知机要求存储多个模型及加权,计算开销较大,更实际的做法是取多个模型的权重的平均,这就是平均感知机。
四、 结构化预测问题
自然语言处理问题大致可分为两类,一种是分类问题,另一种就是结构化预测问题,序列标注只是结构化预测的一个特例,对感知机稍作拓展,分类器就能支持结构化预测。
1.定义
信息的层次结构特点称作结构化。那么结构化预测(structhre,prediction)则是预测对象结构的一类监督学习问题。相应的模型训练过程称作结构化学习(stutured laming )。分类问题的预测结果是一个决策边界, 回归问题的预测结果是一个实数标量,而结构化预测的结果则是一个完整的结构。
自然语言处理中有许多任务是结构化预测,比如序列标注预测结构是一整个序列,句法分析预测结构是一棵句法树,机器翻译预测结构是一段完整的译文。这些结构由许多部分构成,最小的部分虽然也是分类问题(比如中文分词时每个字符分类为{B,M,E,S} ),但必须考虑结构整体的合理程度。
2.结构化预测与学习流程
结构化预测的过程就是给定一个模型 λ 及打分函数 score,利用打分函数给一些备选结构打分,选择分数最高的结构作为预测输出,公式如下:
$$
\hat{y}=\arg \max _{y \in Y} \operatorname{score}_\lambda(x, y)
$$
其中,Y 是备选结构的集合。既然结构化预测就是搜索得分最高的结构 y,那么结构化学习的目标就是想方设法让正确答案 y 的得分最高。不同的模型有不同的算法,对于线性模型,训练算法为结构化感知机。
五、线性模型的结构化感知机算法
1.结构化感知机算法
要让线性模型支持结构化预测,必须先设计打分函数。打分函数的输入有两个缺一不可的参数: 特征 x 和结构 y。但之前介绍的线性模型的“打分函数”只接受一个自变量 x。
做法是定义新的特征函数 ϕ(x,y),把结构 y 也作为一种特征,输出新的“结构化特征向量”。新特征向量与权重向量做点积后,就得到一个标量,将其作为分数:
$$
\operatorname{sore}(x, y)=w \cdot \phi(x, y)
$$
打分函数有了,取分值最大的结构作为预测结果,得到结构化预测函数:
$$
\hat{y}=\arg \max _{y \in Y}(w \cdot \phi(x, y))
$$
预测函数与线性分类器的决策函数很像,都是权重向量点积特征向量。那么感知机算法也可以拓展复用,得到线性模型的结构化学习算法。
- 读入样本 (x,y),进行结构化预测 $\hat{y}=\arg \max _{y \in Y}(w \cdot \phi(x, y))$
- 与正确答案相比,若不相等,则更新参数: 奖励正确答案触发的特征函数的权重,否则进行惩罚: $w \leftarrow w+\phi\left(x^{(i)}, y\right)-\phi\left(x^{(i)}, \hat{y}\right)$
- 还可以调整学习率: $\boldsymbol{w} \leftarrow \boldsymbol{w}+\alpha\left(\phi\left(\boldsymbol{x}^{(i)}, \boldsymbol{y}\right)-\phi\left(\boldsymbol{x}^{(i)}, \hat{\boldsymbol{y}}\right)\right)$
2.结构化感知机与序列标注
上面已经讲了结构化感知机的模型公式,看如何运用到序列标注上,我们知道序列标注最大的结构特点就是标签相互之间的依赖性,这种依赖性利用初始状态概率想俩狗和状态转移概率矩阵体系那,那么对于结构化感知机,就可以使用转移特征来表示:
$$
\phi_{k}\left(y_{t-1}, y_{t}\right)=
\begin{cases}
1, \\
0,
\end{cases} y_{t-1}=s_{i}, \mathrm{H} y_{t}=s_{j} \quad i=0, \cdots, N ; j=1, \cdots, N
$$
其中,$Y_t$ 为序列第 $t$ 个标签,$S_i$ 为标注集第 $i$ 种标签,$N$ 为标注集大小。
状态特征如下,类似于隐马尔可夫模型的发射概率矩阵,状态特征只与当前的状态有关,与之前的状态无关:
$$
\phi_{k}\left(y_{t-1}, y_{t}\right)=
\begin{cases}
1, \\
0,
\end{cases}
$$
于是,结构化感知机的特征函数就是转移特征和状态特征的合集:
$$
\phi=\left[\phi_{k} ; \phi_{l}\right] \quad k=1, \cdots, N^{2}+N ; l=N^{2}+N+1, \cdots
$$
基于以上公式,我们统一用打分函数来表示:
$$
\operatorname{score}(\boldsymbol{x}, \boldsymbol{y})=\sum_{t=1}^{T} \boldsymbol{w} \cdot \phi\left(y_{t-1}, y_{t}, \boldsymbol{x}_{t}\right)
$$
有了打分公式,就可以利用维特比算法求解得分最高的序列。
六、准确性与性能的比较
| 算法 | P | R | F1 | R(oov) | R(IV) |
|---|---|---|---|---|---|
| 最长匹配 | 89.41 | 94.64 | 91.95 | 2.58 | 97.14 |
| 二元语法 | 92.38 | 96.70 | 94.49 | 2.58 | 99.26 |
| 一阶HHM | 78.49 | 80.38 | 79.42 | 41.11 | 81.44 |
| 二阶HHM | 78.34 | 80.01 | 79.16 | 42.06 | 81.04 |
| 平均感知机 | 96.69 | 96.45 | 96.57 | 70.34 | 97.16 |
| 结构化感知机 | 96.67 | 96.64 | 96.65 | 70.52 | 97.35 |
感知机是分类和序列标注上完全达到了实用水平,在实际中,无非还需要挂载一些领域词库。